


随着海洋、河湖水资源的开发、利用和保护,水下作业日益增多,对水下机器人的需求也在增加。南京工程学院创新创业学院陈巍副教授领衔研发的鱼形仿生水下机器人,拥有多种“才艺”,成为水下作业“能手”,已“游进”国际市场。
据了解,水下机器人市场是一片有待充分开发的“蓝海”。“目前水下机器人产品存在着续航能力弱、环境扰动大、机动性能差等问题,我们团队研发的鱼形仿生水下机器人,力求在解决此类问题上取得突破。”陈巍告诉记者。
鱼形仿生水下机器人造型看起来就像常见的鱼,摸起来的手感也很像真鱼。其个子有大有小,大的有8米、10米长,小的只有0.5米长。“大有大的能量,小有小的作用。”陈巍举例说,0.5米长的鱼形机器人在湖泊水质监测中就可以派上用场。比如在对太湖水质进行的一次监测中,300多条0.5米长的鱼形机器人被放到湖水中,每人都有“责任水”,分别负责监测1米、3米、5米、8米、10米深的水质,当场就把PH值、含氧量等水质分析数据采集记录下来,返回时即按设定把数据传递到位。其效率和工作质量,远非传统的“人+船+吊瓶”到湖中多点取水进行监测可比。而对广大的海域进行水下地形地貌勘察,“大个子”鱼形机器人则可大显身手,其身价也不菲,一个售价就要上百万元。该机器人还能像4旋翼无人机在空中跟拍那样,在水下进行跟踪拍摄。
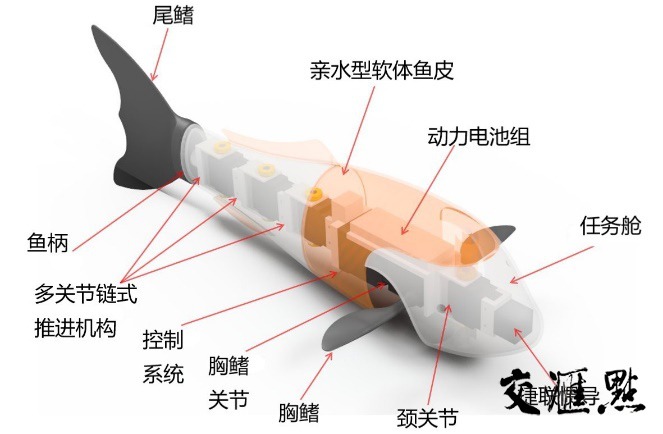
水下作业“能手”的背后是一系列硬核新技术的支撑。鱼形水下机器人研发项目的全称是“复杂水下环境勘查集群仿生机器人关键技术及应用”,由南京工程学院、东南大学和博雅工道(北京)机器人科技有限公司共同完成。陈巍告诉记者,该项研究获得了国家自然科学基金、江苏省人才计划和企业科技支撑项目等10余项资助,科研攻关历时6年,在水下仿生机器人软体亲水型材料、多关节仿生结构与推进系统设计、惯性基的水下组合导航定位技术、基于群体智能协同的水下勘查决策等方面均取得突破。
自主设计了柔性多关节鱼形仿生机器人结构,有效减小流体阻力。首次提出基于实时姿态信息的伺服驱动控制方法,解决了机器人在复杂水下环境里电机频繁换向和缺相故障问题,提高了稳定性。
结构仿生与材料仿生相融合,突破了仿生鱼皮材料耐压等级低、防水性能差、减阻效果弱的技术瓶颈,研制出机器鱼新型肌肉材料。
发明捷联惯导快速对准估计方法,提出基于特定运动轨迹激励的安装误差标校方法,设计基于智能控制的多源信息自适应滤波器,实现信息源的即插即用,在该领域达到国际先进水平。
发明了水下分布式集群航路规划和编队方法,解决了水下机器人航路规划效率低、准确性差、多机编队集结速度慢等技术难题。
“以机器人体长计,我们研发的鱼形机器人转向速度高于国外同类产品20%,初始对准时间缩短5倍,动态对准精度提高10%,多水下仿生机器人集群组网数量>32个,整体作业效率提高5倍,达到国际先进水平,而设备价格仅为国外同种规格仿生机器人的50%。”陈巍自豪地说,项目成果已在技术型企业中实现产业化运作,成功应用于水下沉潜油监测、水域污染物追踪溯源、水下救援侦查、海洋生物观测、水下构筑物勘察、消费级水下无人机等领域,项目产品远销美、日、欧等国家,2018年国内外市场销售额达2.8亿元。
据悉,该项研究获授权专利61件,发表SCI/EI高水平论文30余篇,牵头或参与制定行业标准2项,填补了国内该行业标准空白。
来源:交汇点
编辑:方超





